Method
Algorithm Overview
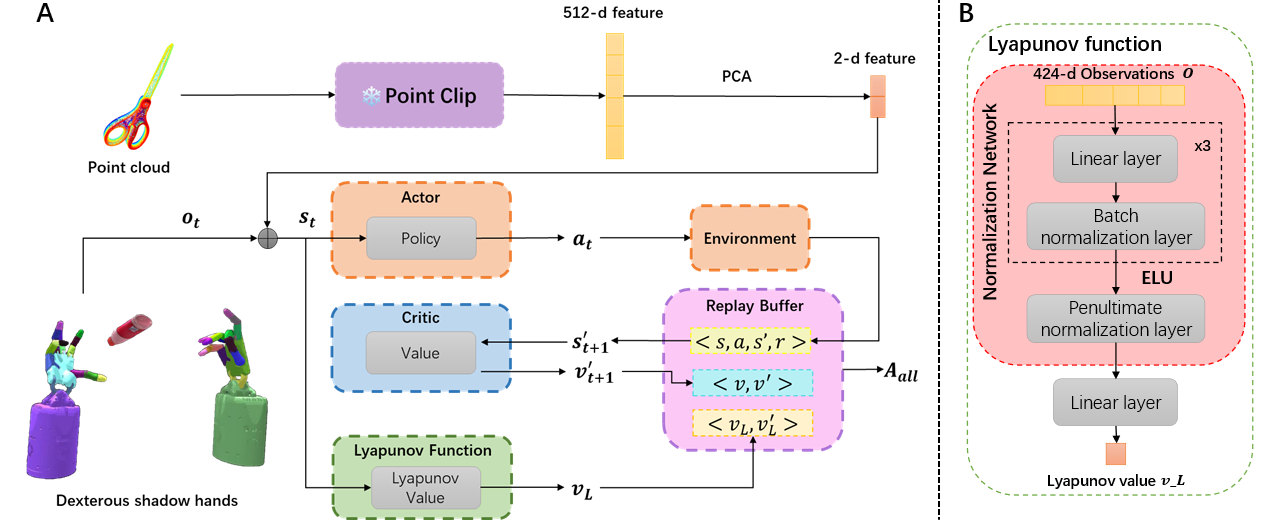
The SCRL algorithm takes as input the environmental observation and the point cloud feature of the object. Then, it learns the catching policy for dexterous hands through an Actor-Critic structure. B: The Lyapunov function, the policy function and the value function are estimated using neural networks. Their network structures are similar, and the only difference is the dimension of the output. For example, the Lyapunov function contains a linear layer, a batch normalization layer, and a penultimate normalization layer, and the last linear layer takes a scalar as output.